Stochastic Spatiotemporal Networks with Mobile Observer Nodes
Published Aug. 9, 2023
Introduction
This research aims to explore and capture stochastic spatiotemporal events using a real-time mobile observational sensor network within multi-agent systems.
Building on prior research on stationary observational networks, this work introduces mobile observer nodes to actively explore connections with temporal events, opening new possibilities for studying spatiotemporal dynamic
The research aims to develop and analyze intelligent node movements in multi-agent systems, including:
- Investigating measures to comprehend stochastic events.
- Designing and comparing planning methods.
- Conducting simulations to assess planning strategies' impact.
Project Overview
The project may be divided into the approach taken and the methodologies used.
Approach
- Spatiotemporal Framework: Develop theories for identifying and reacting to events within complex systems.
- Planning Strategies: Comparing various planning strategies to evaluate efficiency.
- Generalized Dynamic Heatmaps: Adapt specific attributes into a heatmap for broader applicability.
Methodology
- Data Generation: Define and collect necessary data, including synthetic representations of real-world phenomena.
- Models and Implementation: Create mathematical and computational models for event analysis, including dynamic heatmaps.
- Simulation Techniques: Test strategies through simulations, utilizing agents that reflect optimized movement.
- Multi-Agent Coordination: Use spatial segmentation techniques for agent coordination.
- Prediction Models: Implement forecasting methods using classical AI approaches.
- Analysis: Compare different approaches and conduct regret analysis to gauge efficiency.
- Validation and Verification: Ensure accurate and reliable results through robust procedures
Measures
This section provides an overview of the key metrics utilized in the project, categorized into Visited Measures, Nowcast Measures, and Regret Measures. These collective metrics offer insights into the system's exploration efficiency, prediction quality, and adaptability within unpredictable environments.
- Visited Measures: These metrics evaluate the system's ability to identify and analyze areas of significant activity, known as hotspots. They include considerations like the frequency of visits, duration of stay, and coverage ratio, providing insights into the system's exploration depth and breadth.
- Nowcast Measures: Related to the system's ability to make immediate and accurate predictions, these measures include factors like precision, recall, and F1 Score. They help in evaluating the system's reliability in forecasting events within the given environment.
- Regret Measures: Focusing on the discrepancies between decisions made with perfect versus imperfect information, these measures examine aspects like decision deviation, impact analysis, and adaptive capability. They offer insights into the system's limitations, adaptability, and the real-world significance of its decisions
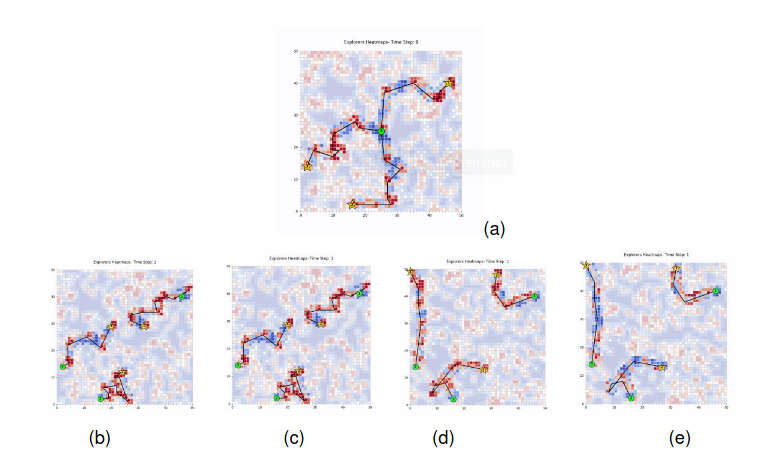
Explorer Agents (i.e., Observers)
The Explorer Agents, serving as observer nodes, are characterized by three parallel explorers, a movement speed setting, strategic positioning, and a defined view size and partition grid, allowing for targeted planning.
Simulations & Results
Analysis shows the efficiency of different strategies within the multi-agent network. The results reveal the importance of integrating strategy and knowledge level to optimize performance, setting the groundwork for future enhancements. Descriptive figures and captions, if provided, will offer visual insights.
Future Work
This research has highlighted complexities in analyzing stochastic events with multi-agent systems. Future development will focus on:
- Enhancing Planning through Improved Forecasting: This includes identifying challenges and encouraging collaborative research to increase reliability and precision in real-time adaptation.
- Exploring Uncertainty and Regret: Developing a framework to understand how uncertainty may lead to regretful outcomes.
- Developing New Partitioning Approaches: Investigating algorithms and models to improve efficiency in partitioning within the network, integrating forecasting techniques and simulations for validation.